Grasp Planner Finger Parameters (Coordinate Systems)¶
The parameters in this section provides user the flexibility to define the coordinate system definition for their gripper.
For grasp_approach_direction axis, it is defined as the direction along which the end effector will travel
to approach the object to grasp it.
For the grasp_stroke_direction axis, it is defined as the direction from one side of the finger gripper to another,
i.e the direction of movement when the finger gripper closes
For the grasp_stroke_normal_direction axis, is defined as the direction perpendicular to both
grasp_stroke_direction and grasp_approach_direction.
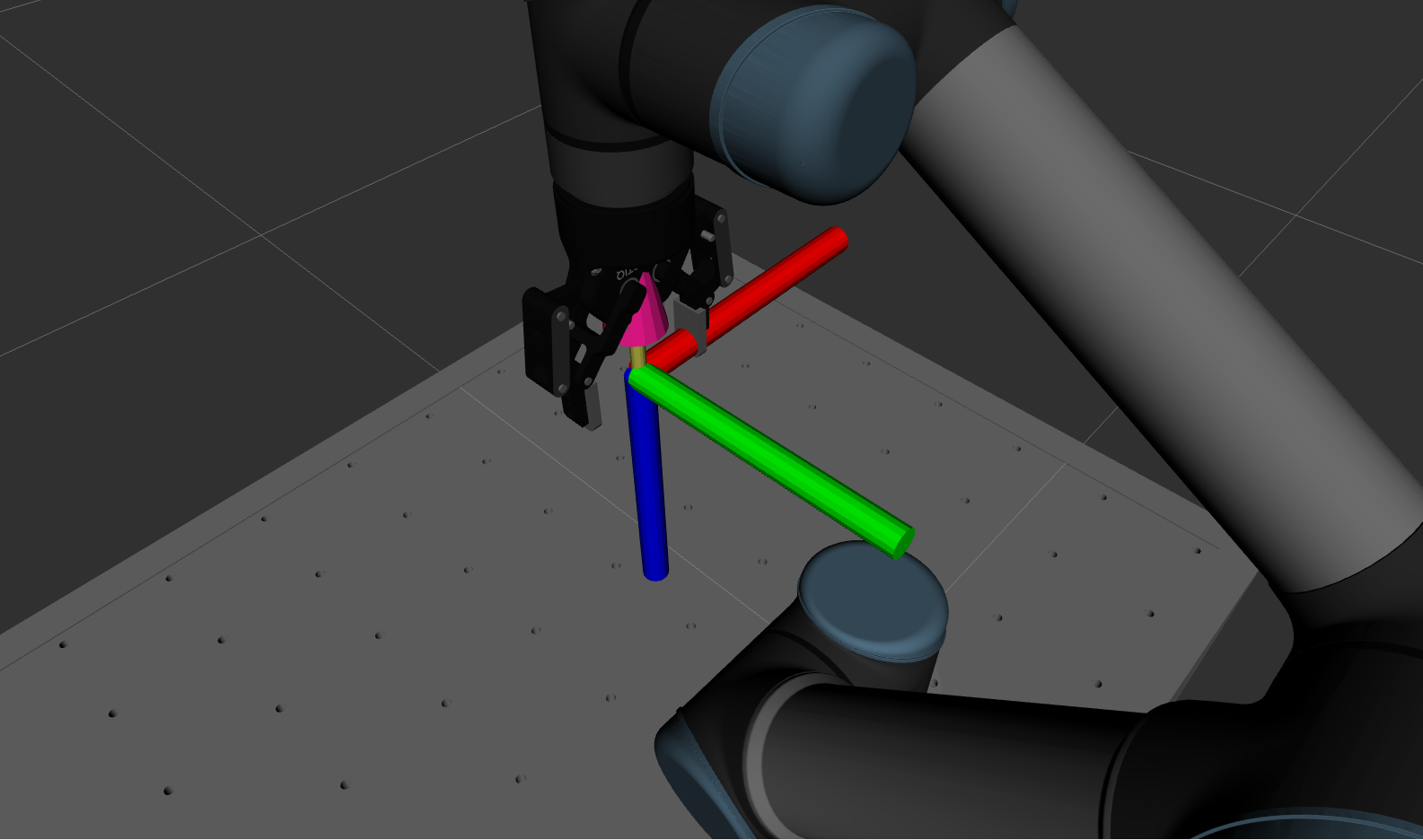
For this particular configuration below, assuming the RGB-XYZ convention, the coordinate system is defined as the following:
gripper_coordinate_system:
grasp_stroke_direction: "x"
grasp_stroke_normal_direction: "y"
grasp_approach_direction: "z"
<finger_gripper_name>.gripper_coordinate_system.grasp_stroke_direction¶
length_direction: "x"
Description |
Axes defining the grasp stroke direction |
|---|---|
Type |
String |
Warning
Restricted to "x" , "y" or "z"
<finger_gripper_name>.gripper_coordinate_system.grasp_stroke_normal_direction¶
breadth_direction: "y"
Description |
Axes defining the grasp stroke normal direction |
|---|---|
Type |
String |
Warning
Restricted to "x" , "y" or "z"
<finger_gripper_name>.gripper_coordinate_system.grasp_approach_direction¶
grasp_approach_direction: "z"
Description |
Axes defining the grasp approach direction |
|---|---|
Type |
String |
Warning
Restricted to "x" , "y" or "z"