Grasp Planner Finger Parameters (Physical Attributes)¶
The Parameters in this Section specifically defines the physical attributes of the finger gripper. These parameters provide additional flexibility for grasp planner to support a myriad of finger grippers.
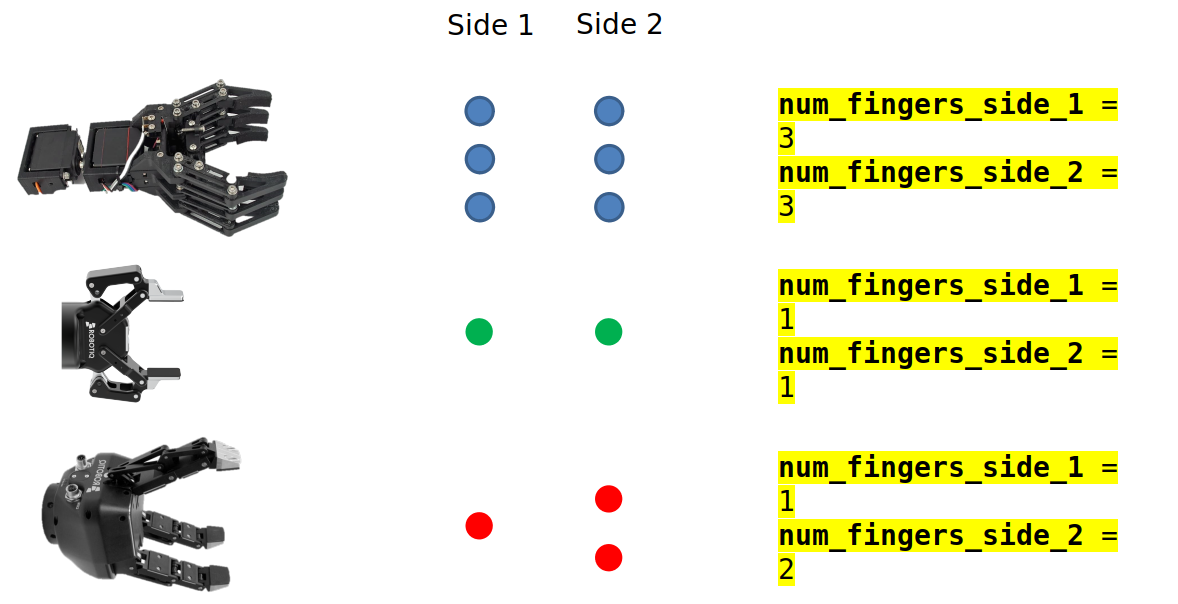
The current grasp planner supports linear finger grippers, Where there are two main sides containing the fingers, and grasping motions are paralell to the direction of distribution of fingers
finger_gripper_1:
type: finger
num_fingers_side_1: 1
num_fingers_side_2: 1
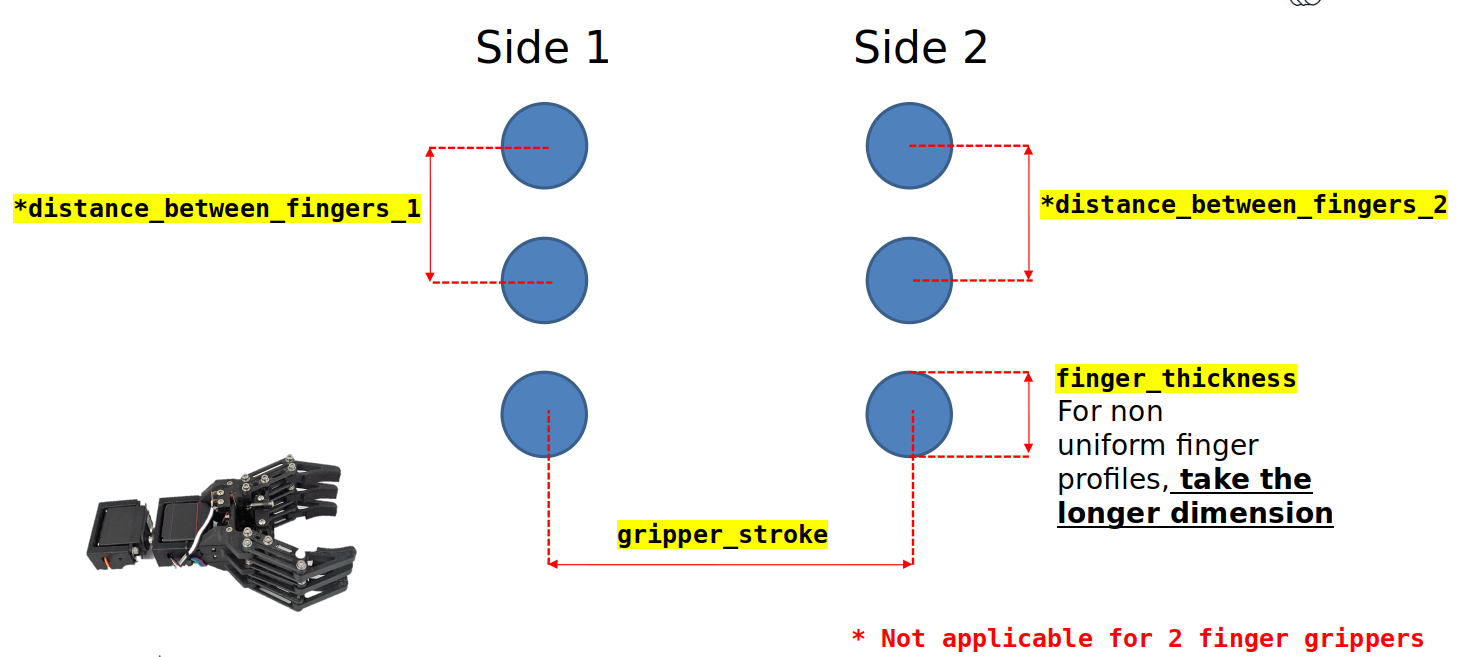
distance_between_fingers_1: 0.0
distance_between_fingers_2: 0.0
finger_thickness: 0.02
gripper_stroke: 0.105
<finger_gripper_name>.type¶
type: finger
Description |
Describes gripper type |
|---|---|
Type |
String |
Warning
Do not change this parameter, leave it as finger
<finger_gripper_name>.num_fingers_side_1¶
num_cups_length: 1
Description |
Number of fingers on side 1 |
|---|---|
Type |
Int |
Warning
Should be at least 1
<finger_gripper_name>.num_fingers_side_2¶
num_cups_breadth: 1
Description |
Number of fingers on side 2 |
|---|---|
Type |
Int |
Warning
Should be at least 1
<finger_gripper_name>.distance_between_fingers_1¶
distance_between_fingers_1: 0.0
Description |
Center-to-center finger distance between fingers in side 1 |
|---|---|
Type |
Double |
Warning
If num_fingers_side_1 is 1, set distance_between_fingers_1 as 0.0
<finger_gripper_name>.distance_between_fingers_2¶
distance_between_fingers_2: 0.0
Description |
Center-to-center finger distance between fingers in side 2 |
|---|---|
Type |
Double |
Warning
If num_fingers_side_2 is 1, set distance_between_fingers_2 as 0.0
<finger_gripper_name>.finger_thickness¶
finger_thickness: 0.02
Description |
Maximum dimension of the finger (dimensions along the axis perpedicular to the approach direction) |
|---|---|
Type |
Double |
Note
We represent each finger as a sphere, which only requires one dimension, hence the largest dimension of the finger should be provided
<finger_gripper_name>.gripper_stroke¶
gripper_stroke: 0.105
Description |
Distance between both sides of the finger gripper |
|---|---|
Type |
Double |