Grasp Planner Suction Parameters (Coordinate Systems)¶
The parameters in this section provides user the flexibility to define the coordinate system definition for their gripper.
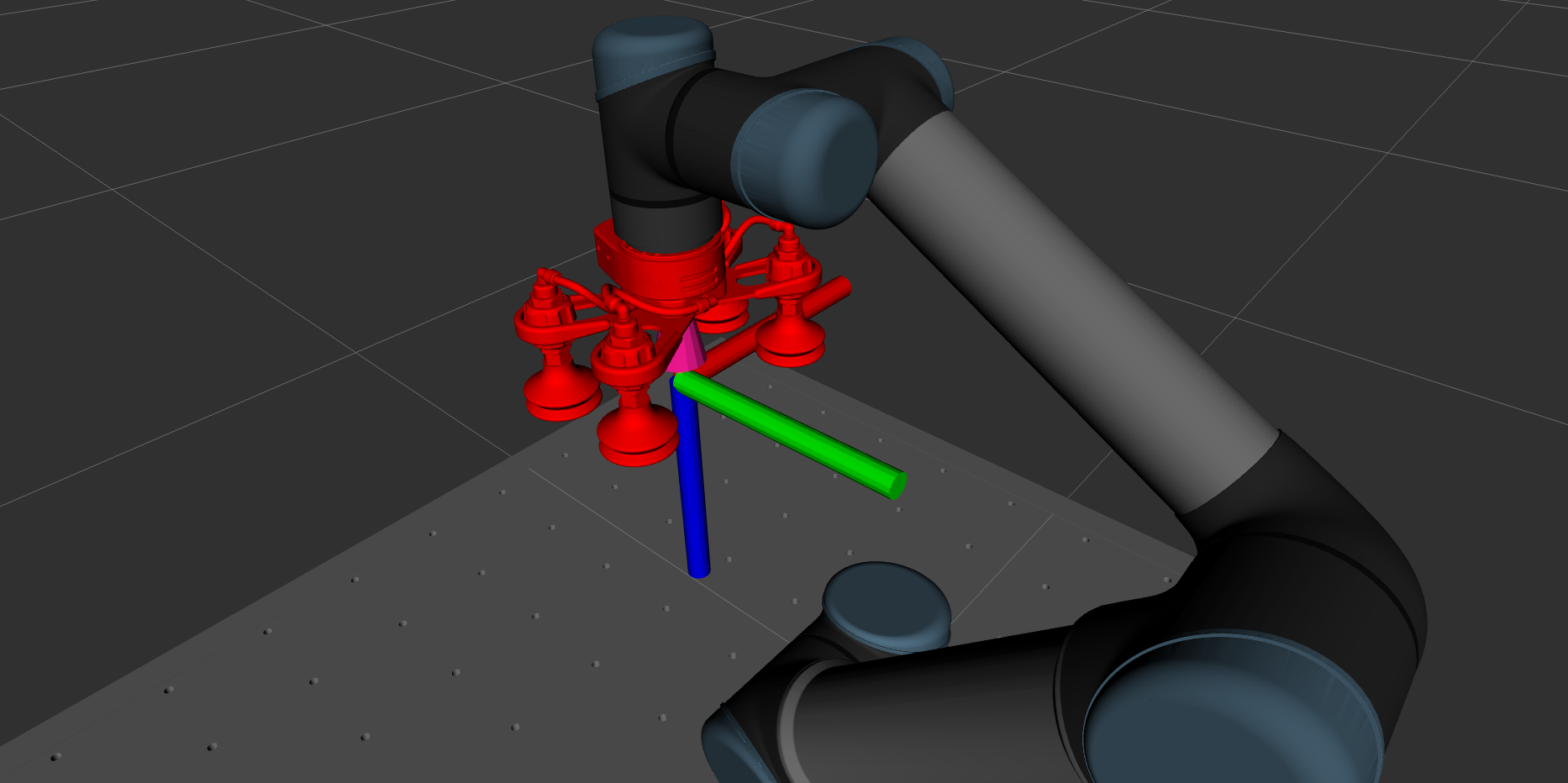
For grasp_approach_direction axis, it is defined as the direction along which the end effector will travel
to approach the object to grasp it.
For the length_direction and breadth_direction, these are the perpendicular axes along which the suction
cups are arranged. Which direction is length and breadth can be arbitrarily defined, but should be
consistent with the definition for the parameters in Grasp Planner Suction Parameters (Physical Attributes)
For this particular configuration below, assuming the RGB-XYZ convention, the coordinate system is defined as the following:
gripper_coordinate_system:
length_direction: "x"
breadth_direction: "y"
grasp_approach_direction: "z"
<suction_gripper_name>.gripper_coordinate_system.length_direction¶
length_direction: "x"
Description |
Axes defining the length direction |
|---|---|
Type |
String |
Warning
Restricted to "x" , "y" or "z"
<suction_gripper_name>.gripper_coordinate_system.breadth_direction¶
breadth_direction: "y"
Description |
Axes defining the breadth direction |
|---|---|
Type |
String |
Warning
Restricted to "x" , "y" or "z"
<suction_gripper_name>.gripper_coordinate_system.grasp_approach_direction¶
grasp_approach_direction: "z"
Description |
Axes defining the grasp approach direction |
|---|---|
Type |
String |
Warning
Restricted to "x" , "y" or "z"