Grasp Planner Suction Parameters (Physical Attributes)¶
The Parameters in this Section specifically defines the physical attributes of the suction gripper. These parameters provide additional flexibility for grasp planner to support a myriad of suction grippers.
suction_gripper_1:
type: suction
num_cups_length: 1
num_cups_breadth: 1
dist_between_cups_length: 0.06
dist_between_cups_breadth: 0.06
cup_radius: 0.005
cup_height: 0.01
Note
“Length” and “Breadth” elements can be determined by the user, as long as it remains consistent for the whole file
<suction_gripper_name>.type¶
type: suction
Description |
Describes gripper type |
|---|---|
Type |
String |
Warning
Do not change this parameter, leave it as suction
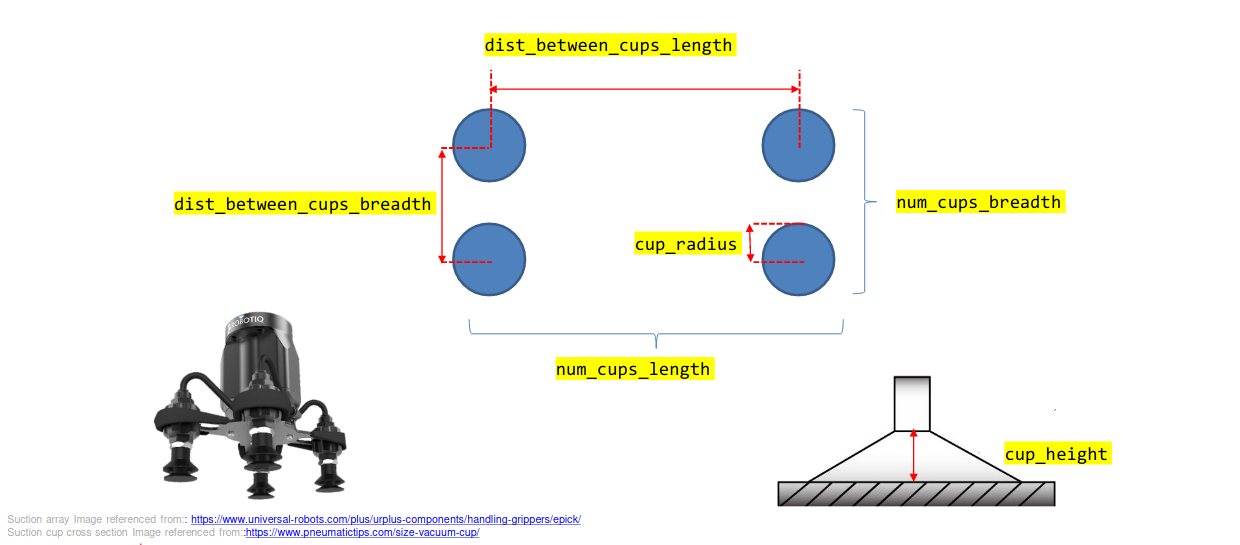
<suction_gripper_name>.num_cups_length¶
num_cups_length: 1
Description |
Number of cups in the length direction |
|---|---|
Type |
Int |
Warning
Should be at least 1
<suction_gripper_name>.num_cups_breadth¶
num_cups_breadth: 1
Description |
Number of cups in the breadth direction |
|---|---|
Type |
Int |
Warning
Should be at least 1
<suction_gripper_name>.dist_between_cups_length¶
dist_between_cups_length
Description |
Center-to-center distance between in the length direction (m) |
|---|---|
Type |
Double |
<suction_gripper_name>.dist_between_cups_breadth¶
dist_between_cups_breadth
Description |
Center-to-center distance between in the breadth direction (m) |
|---|---|
Type |
Double |
<suction_gripper_name>.cup_radius¶
cup_radius: 0.005
Description |
Radius of each suction cup |
|---|---|
Type |
Double |
<suction_gripper_name>.cup_height¶
cup_height: 0.01
Description |
Height of each suction cup |
|---|---|
Type |
Double |