Check if scene is properly generated¶
Next, to check if the scene is properly created, we will try running the package. In /workcell_ws/ ,
source /opt/ros/foxy/setup.bash
cd ~/workcell_ws/src
colcon build
source install/setup.bash
ros2 launch new_scene demo.launch
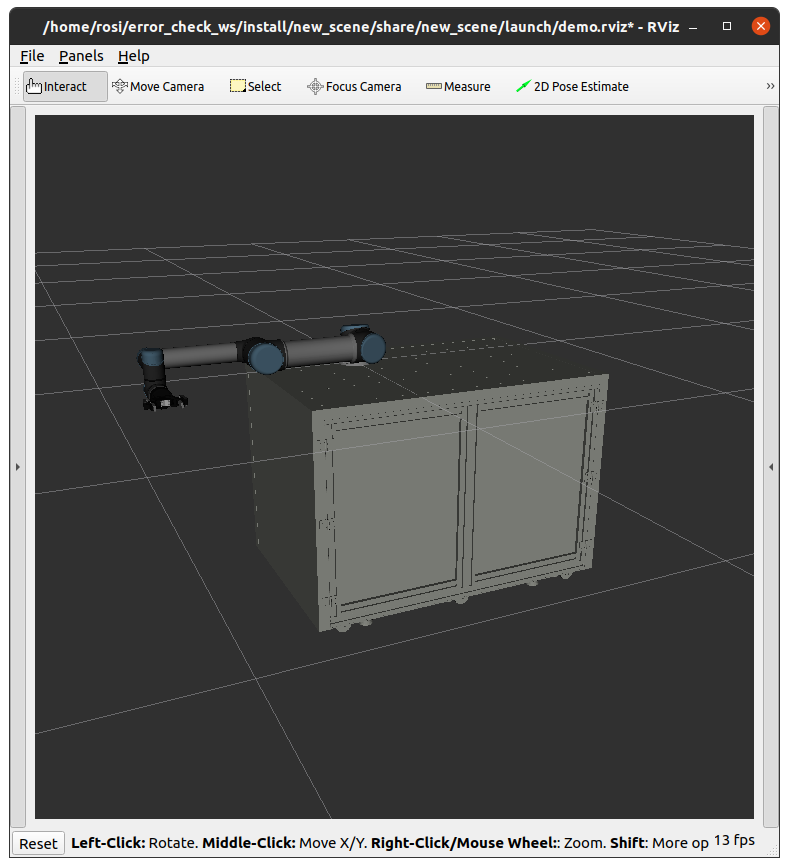
RViz should be launched, and you should see your workspace in the simulation.
Now we have a simulated set up of the scene. However, typically a manipulation system would need some form of perception system, which will be addresed next: Next step: Adding a camera to the scene