Adding an end effector¶

In the scene creation window, check the Include End Effector and click Add End Effector
In the End Effector Brand field , choose robotiq_85_gripper
In the End Effector Model field, choose robotiq_85
In the End Effector Link field, choose gripper_base_link
In the End Effector Type field, choose finger
In the Fingers field, choose 2
Since we want the end effector to be right at the point of the robot’s end effector link, we can leave the origin field unchecked. If you want a certain offset for your end effector with respect to the robot, you can add an origin component with your required values. Your final window should look like this:
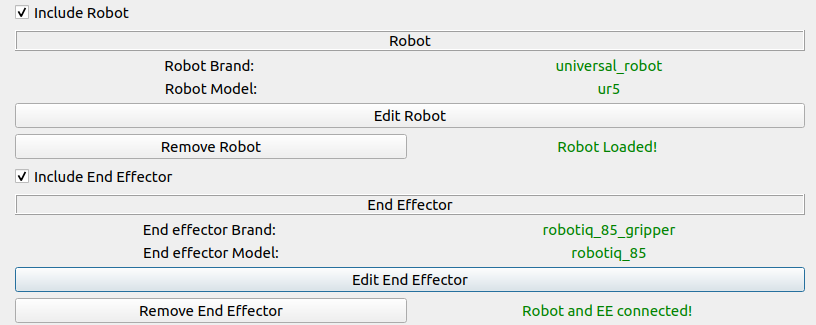
click Ok , and the scene creation window will show an end effector loaded confirmation as well.
Next step: Adding an Object